Suunto EON Core Uživatelská příručka 4.0
Dekompresní algoritmy
Vývoj původního dekompresního modelu společnosti Suunto byl zahájen v 80. letech 20. století, kdy byl v přístroji Suunto SME implementován Bühlmannův algoritmus založený na M-hodnotách. Od té doby probíhá neustálý vývoj původního algoritmu s pomocí externích i interních odborníků.
Na konci 90. let 20. století společnost Suunto obohatila svůj předchozí dekompresní model založený na M-hodnotách o poznatky RGBM algoritmu dr. Bruce Wienkeho. První produkty s implementací tohoto modelu byly ikonické Suunto Vyper a Suunto Stinger. Tyto přístroje znamenaly významné zvýšení bezpečnosti, jelikož braly v potaz mnoho okolností, které se při potápění vyskytují a které modely vybavené starší technologií nebyly schopny měřit:
- Sledování opakovaných ponorů v rozmezí několika po sobě jdoucích dnů
- Měření opakovaných ponorů s velmi krátkými intervaly
- Zohlednění vlivu hlubšího ponoru, než byl předcházející
- Adaptace na rychlý výstup produkující velké množství mikrobublin
- Přesné výpočty v souladu s fyzikálními zákony kinetiky reálných plynů
Suunto EON Core nabízí dva dekompresní algoritmy: Algoritmus Suunto Fused™ RGBM 2 a algoritmus Bühlmann 16 GF. Vhodný algoritmus pro svůj ponor vyberte v nabídce Nastavení ponoru » Parametry » Algoritmus.
Všechny dekompresní modely jsou teoretické a mají své výhody i omezení. Při výběru vhodného dekompresního algoritmu a osobního nastavení nebo faktorů gradientu pro váš ponor vždy zohledněte své osobní faktory, plánovaný ponor a svůj potápěčský trénink.
Ačkoli je to možné, změna algoritmu mezi ponory se nedoporučuje, pokud je aktivní výpočet doby zákazu létání.
Vždy se ujistěte, že se na potápěčském počítači Suunto nachází nejnovější verze softwaru s aktualizacemi a vylepšeními. Než se vydáte potápět, vždy si ověřte na webových stránkách www.suunto.com/support, zda není pro váš potápěčský počítač k dispozici aktualizace softwaru. Pokud je nová verze k dispozici, bezpodmínečně proveďte instalaci před zahájením ponoru. Aktualizace mají zlepšit uživatelské pohodlí a jsou součástí filozofie společnosti Suunto spočívající v neustálém zdokonalování svých produktů.
Algoritmus Suunto Fused™ RGBM 2
Algoritmus Suunto Fused™ RGBM 2 spojuje a vylepšuje všeobecně uznávané dekompresní algoritmy Suunto RGBM a Suunto Fused™ RGBM, na jejichž vývoji spolupracovali společnost Suunto a dr. Bruce Wienke. (Potápěčské algoritmy společnosti Suunto představují vrchol odborných znalostí nahromaděných díky desetiletím vývoje, testování a milionům ponorů.)
V algoritmu Suunto Fused™ RGBM 2 jsou tkáňové poločasy odvozeny od Wienkeho algoritmu FullRGBM, ve kterém je lidské tělo modelováno prostřednictvím patnácti různých tkáňových skupin. Algoritmus FullRGBM těchto přídavných skupin využívá k přesnějšímu modelování vlivu saturace a desaturace. Množství dusíku a helia v tkáních během saturace a desaturace se počítá v jednotlivých skupinách nezávisle.
Algoritmus Suunto Fused™ RGBM 2 podporuje potápění v režimu otevřeného i uzavřeného okruhu, a to až do hloubky 150 metrů. Ve srovnání se staršími algoritmy je Fused™ RGBM 2 méně konzervativní při hlubokých ponorech se vzduchem, u nichž dovoluje kratší doby výstupu. Kromě toho algoritmus již nevyžaduje, aby tkáně byly při výpočtu zákazu létání zcela bez zbytkových plynů, čímž se zkracuje požadovaná doba mezi posledním ponorem a létáním.
Výhodou algoritmu Suunto Fused™ RGBM 2 je zvýšení bezpečnosti díky schopnosti adaptace na širokou škálu situací. Rekreačním potápěčům dovoluje v závislosti na osobním nastavení mírně delší bezdekompresní intervaly. Technickým potápěčům používajícím přístroje s otevřeným okruhem dovoluje použití dýchacích směsí s heliem (při hlubších a delších ponorech umožňují dýchací směsi založené na heliu kratší dobu výstupu). A pro potápěče používající rebreathery představuje algoritmus Suunto Fused™ RGBM 2 perfektní nástroj k použití jako potápěčský počítač bez kalkulace sycení se zobrazením žádaných hodnot.
Přístroje Suunto EON Core s verzí softwaru starší než 2.0 používají algoritmus Suunto Fused™ RGBM. Po aktualizaci na nejnovější software se do potápěčského počítače nainstaluje Suunto Fused™ RGBM 2.
Algoritmus Bühlmann 16 GF
Bühlmannův dekompresní algoritmus vyvinul švýcarský lékař Dr. Albert A. Bühlmann, který se od roku 1959 zabýval teorií dekomprese. Bühlmannův dekompresní algoritmus je teoretický matematický model popisující způsob, jakým inertní plyny vstupují do lidského těla a vystupují z něj při změně okolního tlaku. V průběhu let bylo vyvinuto několik verzí Bühlmannova algoritmu, které převzalo mnoho výrobců potápěčských počítačů. Potápěčský algoritmus Bühlmann 16 GF společnosti Suunto vychází z modelu ZHL-16C. Tento model má 16 různých teoretických tkáňových skupin s poločasy od 4 minut do 635 minut.
Faktory gradientu
Faktor gradientu (GF) je parametr, který se používá pouze u Bühlmannova potápěčského algoritmu. GF jsou možností, jak přidat Bühlmannovu algoritmu konzervativnost přidáním hloubkových zastávek do ponoru. GF se dělí na dva samostatné parametry, dolní a horní faktor gradientu. Pomocí GF s Bühlmannovým algoritmem můžete nastavit bezpečnostní rezervu pro ponor přidáním konzervatismu pro kontrolu, kdy různé tkáňové skupiny dosáhnou přijatelné M-hodnoty.
Faktor gradientu se vždy uvádí v procentech. Hodnota Nízký (%) určuje první hloubkovou zastávku, zatímco hodnota Vysoký (%) definuje povolenou M-hodnotu po vynoření nad hladinu. Při této metodě se GF mění po celou dobu výstupu.
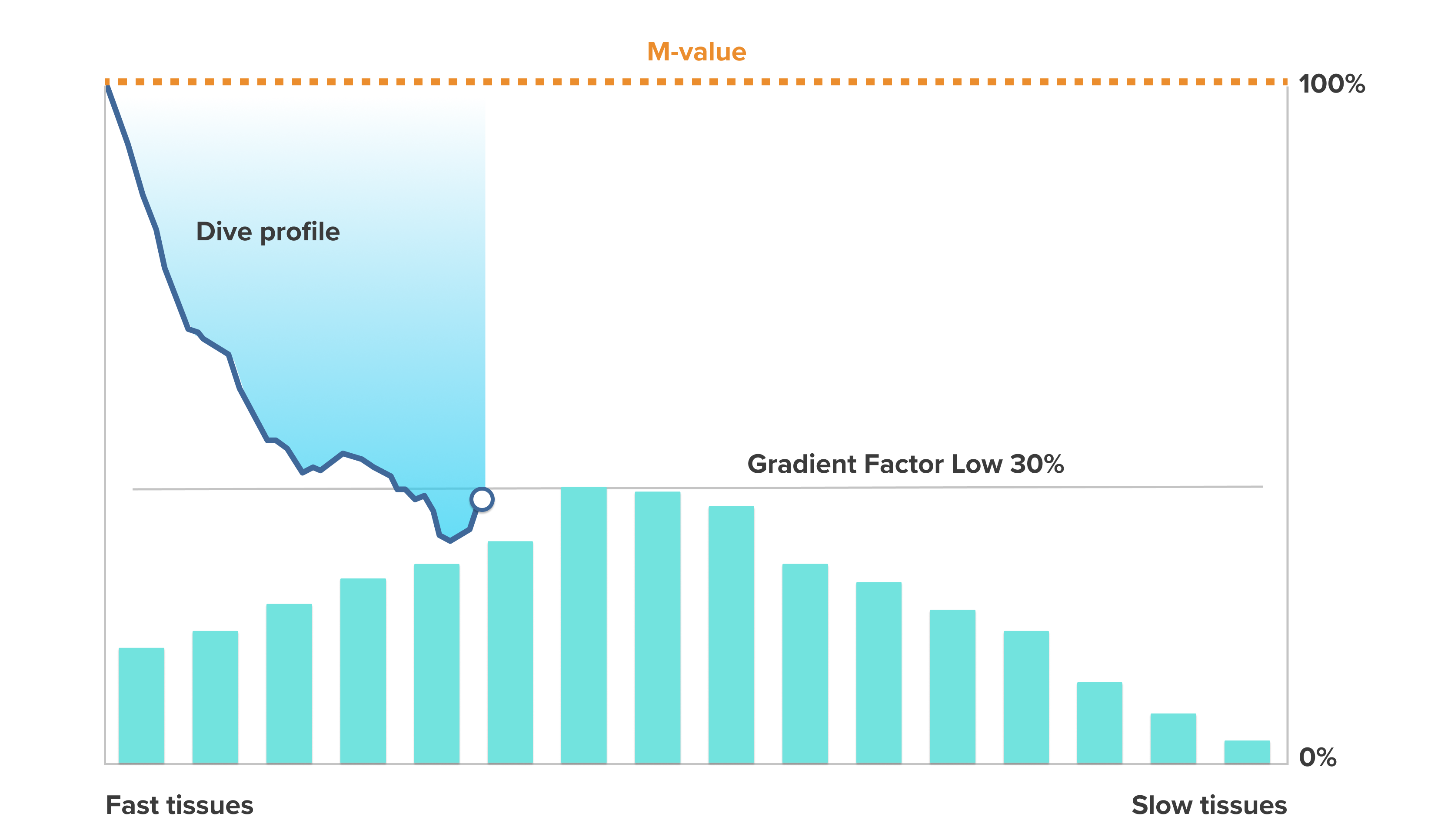
Běžně používaná kombinace je dolní GF 30 % a horní GF 70 %. (Píše se také jako GF 30/70.) Toto nastavení znamená, že k prvnímu zastavení dojde, jakmile první tkáň dosáhne 30 % své M-hodnoty. Čím nižší je první číslo, tím menší je přípustné přesycení. V důsledku toho je nutné první zastávku udělat, když jste hlouběji. Na následujícím obrázku je hodnota dolního GF nastavena na 30 % a nejrychlejší tkáňové skupiny reagují na 30% hranici M-hodnoty. V této hloubce se uskuteční první dekompresní zastávka.
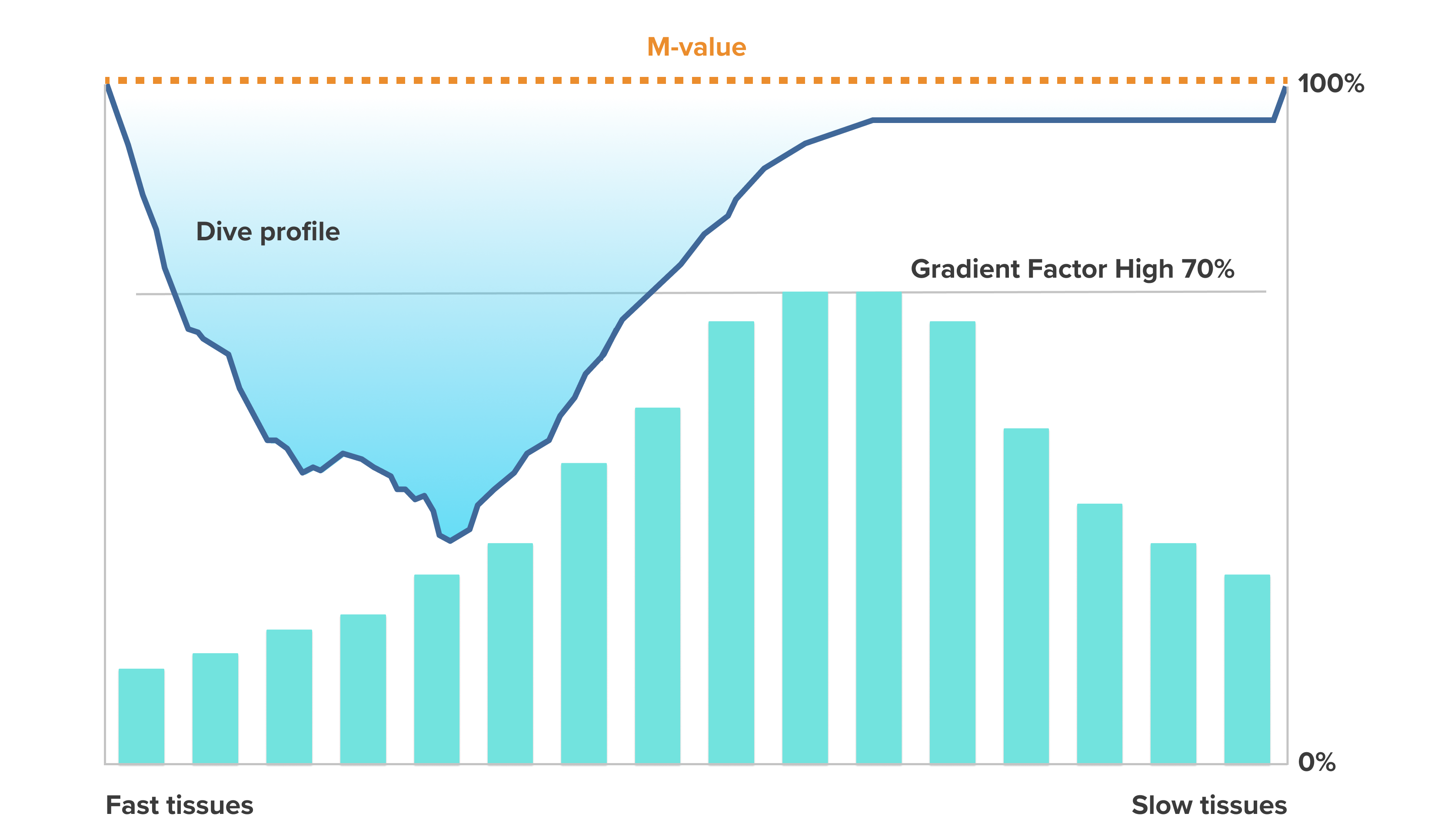
Když stoupání pokračuje, GF se posune z 30 % na 70 %. GF 70 udává povolené množství přesycení při výstupu na hladinu. Čím nižší je hodnota horního GF, tím delší mělká zastávka je nutná k dekompresi před vynořením. Na následujícím obrázku je hodnota horního GF nastavena na 70 % a rychlé tkáňové skupiny reagují na 70% hranici M-hodnoty. V tomto okamžiku se můžete vrátit na hladinu a ponor dokončit.
Výchozí nastavení potápěčského algoritmu Suunto Bühlmann 16 GF je 30/70. Všechny jiné než výchozí hodnoty nejsou doporučené. Pokud změníte výchozí hodnoty, číslo hodnoty zčervená a na obrazovce se zobrazí upozornění.
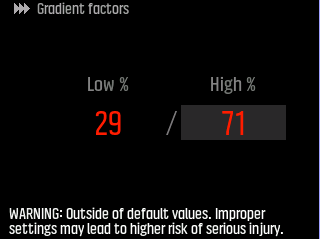
Neupravujte hodnoty faktoru gradientu, pokud nejste dokonale obeznámeni s jeho účinky. Některá nastavení faktoru gradientu mohou způsobit vysoké riziko DCS nebo jiného zranění osob.
Vliv faktorů gradientu na profil ponoru
Vliv GF Nízký (%) na profil ponoru je znázorněn na následujícím obrázku. Ukazuje, jak GF Nízký (%) určuje hloubku, ve které se stoupání začíná zpomalovat, a hloubku první dekompresní zastávky. Obrázek ukazuje, jak různé hodnoty GF Nízký (%) mění hloubku první zastávky. Čím vyšší je hodnota GF Nízký (%), tím výše se první zastávka bude nacházet.
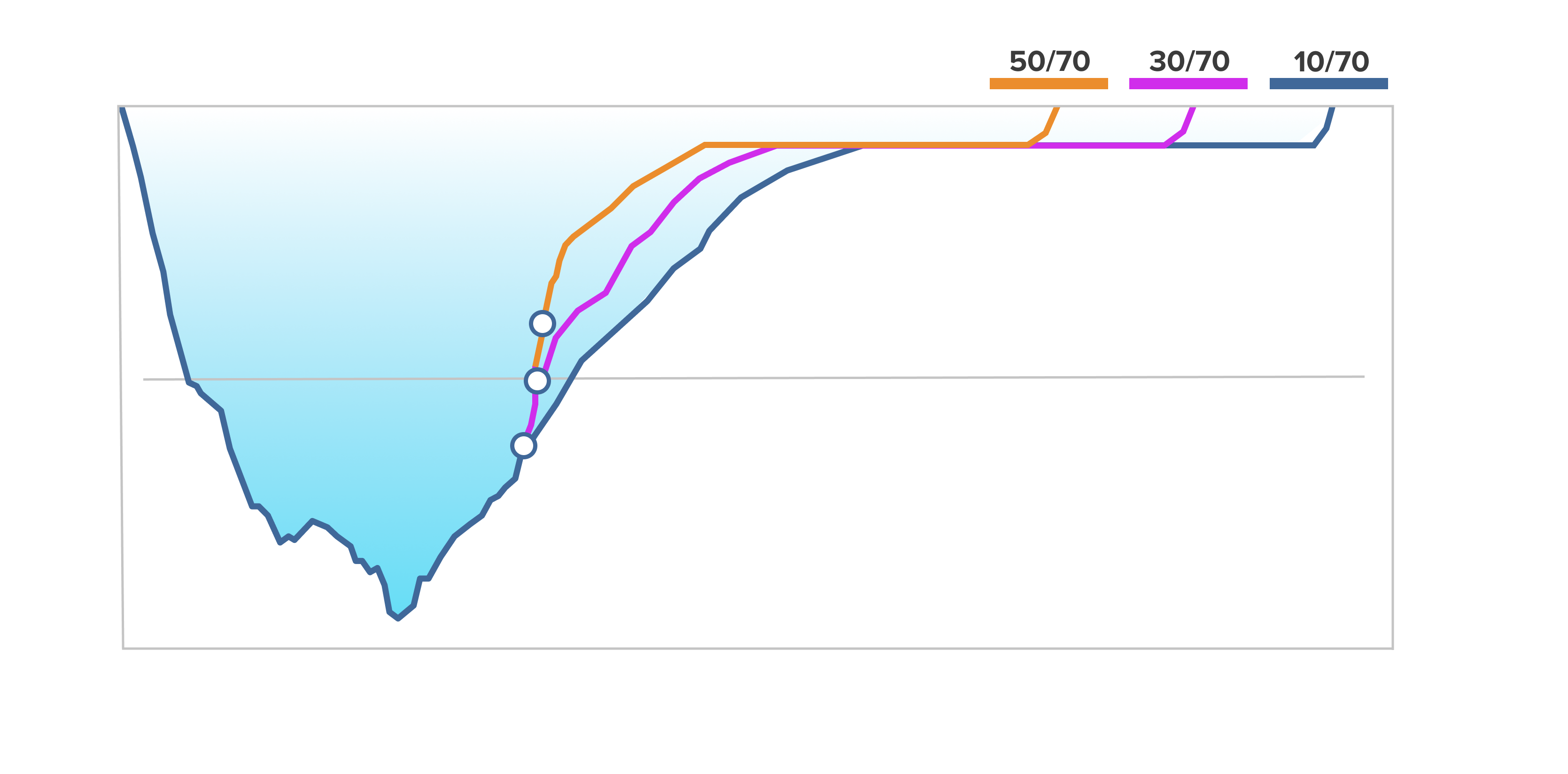
Pokud je hodnota GF Nízký (%) příliš nízká, může u některých tkání při prvním zastavení stále docházet ke kompresi.
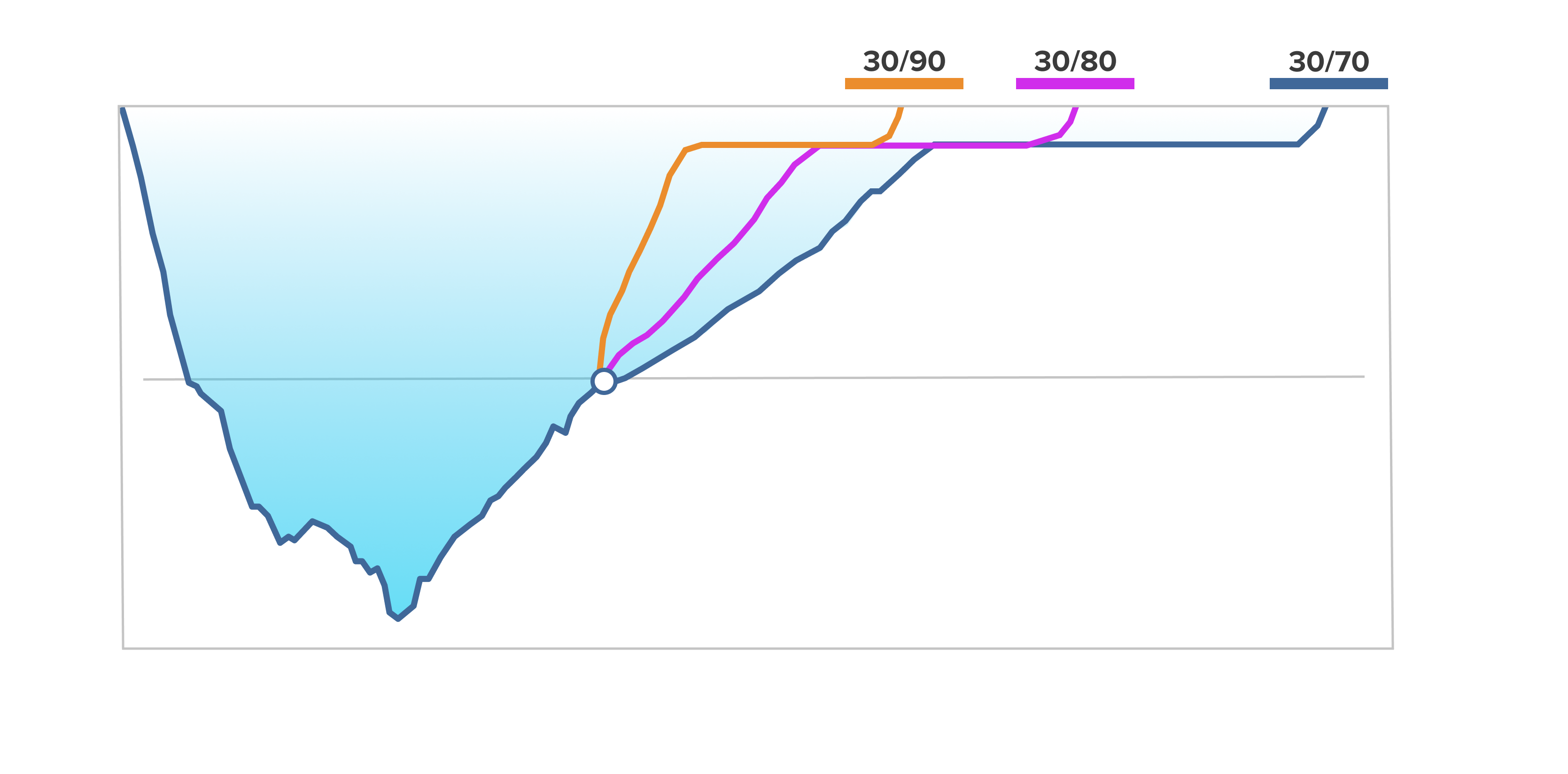
Vliv GF Vysoký (%) na profil ponoru je znázorněn na následujícím obrázku. Ukazuje, jak GF Vysoký (%) určuje dobu dekomprese strávenou v mělké fázi ponoru. Čím vyšší je hodnota GF Vysoký (%) , tím kratší je celková doba ponoru a tím méně času potápěč stráví v mělké vodě. Pokud je GF Vysoký (%) nastaven na nižší hodnotu, potápěč stráví více času v mělké vodě a celková doba ponoru se prodlouží.
Pokud si chcete prohlédnout srovnání algoritmu Suunto Fused™ RGBM 2 a algoritmu Bühlmann 16 GF, přejděte na web suunto.com/support.
Bezpečnost při potápění
Protože všechny dekompresní modely jsou čistě teoretické a nereflektují skutečný stav konkrétního potápěče, nemůže žádný z modelů zaručeně zabránit vzniku dekompresní nemoci.
Vždy používejte totožné hodnoty osobního a výškového přizpůsobení pro plánování ponoru i pro ponor samotný. Zvýšení hodnot osobních nebo výškových přizpůsobení oproti plánu může vést k delším intervalům dekomprese, a tudíž vyšším požadavkům na objem plynu. Pokud hodnoty osobních přizpůsobení po plánování ponoru změníte, hrozí nebezpečí předčasného vyčerpání vzduchu v lahvi.
Působení kyslíku
Výpočty vystavení působení kyslíku jsou založeny na aktuálních tabulkách limitních časů vystavení působení kyslíku a zažitých standardech. Kromě toho potápěčský počítač využívá několik metod pro přiměřený odhad vystavení působení kyslíku. Například:
- Zobrazené hodnoty vystavení působení kyslíku jsou zaokrouhleny na nejbližší vyšší procentní hodnotu.
- Limity CNS % do výše až 1,6 bar (23,2 psi) jsou založeny na limitech uvedených v příručce potápění NOAA z roku 1991.
- Sledování OTU je založeno na dlouhodobé denní toleranci a poměr zotavení je snížen.
Informace vztahující se k působení kyslíku jsou potápěčským počítačem zobrazeny tak, aby byla zobrazená upozornění relevantní k aktuální fázi ponoru. Následující údaje budou například zobrazeny před ponorem a v jeho průběhu, pokud je počítač nastaven v režimu Air/Nitrox nebo Trimix (pokud je při používání aktivováno helium):
- Nastavená hodnota O2% (a případně % helia)
- CNS % a OTU (viditelné pouze po přizpůsobení v aplikaci Suunto)
- Zvukové upozornění v případě, že CNS % dosáhne hodnoty 80 %, a poté varování při překročení limitu 100 %
- Oznámení v případě, že OTU dosáhne hodnoty 250, a poté varování při překročení limitu 300
- Zvukový alarm v případě, že pO2 překročí přednastavený limit (alarm vysoké hodnoty pO2)
- Zvukový alarm v případě, že hodnota pO2 bude < 0,18 (alarm nízké hodnoty pO2)
POKUD HODNOTA LIMITNÍHO PODÍLU KYSLÍKU INDIKUJE DOSAŽENÍ MAXIMÁLNÍ HODNOTY, JE NEZBYTNÉ OKAMŽITĚ PROVÉST OPATŘENÍ PRO SNÍŽENÍ PŮSOBENÍ KYSLÍKU. V opačném případě hrozí nebezpečí otravy kyslíkem, zranění či smrti.