Suunto Ocean Manuale dell'utente
Impostazioni dell’algoritmo
Lo sviluppo del modello di decompressione di Suunto risale agli anni ottanta, quando Suunto ha applicato il modello di Bühlmann basato sui valori M al computer SME. Da allora, la ricerca e lo sviluppo proseguono con l’aiuto di esperti esterni e interni.
Algoritmo Bühlmann 16 GF
L’algoritmo di decompressione Bühlmann è stato sviluppato dal medico svizzero dott. Albert A. Bühlmann, che ha studiato a fondo la teoria della decompressione a partire dal 1959. L'algoritmo di decompressione Bühlmann è un modello teorico-matematico che descrive il modo in cui i gas inerti vengono assorbiti e poi rilasciati dal corpo umano man mano che la pressione ambiente cambia. Negli anni sono state sviluppate diverse versioni dell’algoritmo Bühlmann, che sono state adottate da numerosi produttori di computer per immersioni. Suunto Ocean utilizza una versione dell’algoritmo di immersione di Suunto Bühlmann 16 GF, basata sul modello Bühlmann ZHL-16C e perfezionata con il nostro codice. L’algoritmo si può modificare utilizzando i fattori di gradiente per impostare il livello di cautela.
dal momento che tutti i modelli di decompressione sono puramente teorici e non tengono sotto controllo ciò che avviene realmente nel corpo del subacqueo, nessun modello di decompressione può garantire l’assenza di MDD. Tieni sempre conto dei fattori personali, dell’immersione pianificata e del tuo livello di addestramento quando scegli i fattori di gradiente appropriati per l’immersione.
Fattori di gradiente
Il fattore di gradiente (GF) è un parametro che consente di creare vari livelli di cautela. I GF sono divisi in due parametri separati: fattore di gradiente basso e fattore di gradiente alto.
Utilizzando il GF con l’algoritmo Bühlmann, è possibile impostare il proprio margine di sicurezza per l’immersione aggiungendo un livello di cautela per controllare quando i diversi compartimenti tissutali raggiungono il rispettivo valore M accettabile. Un fattore di gradiente si definisce come la percentuale del gradiente del valore M e può andare dallo 0% al 100%.
Una combinazione comunemente utilizzata è quella del GF basso al 30% e del GF alto al 70% (può essere indicata con GF 30/70). Questa impostazione indica che la prima sosta dovrebbe essere eseguita quando il tessuto principale raggiunge il 30% del suo valore M. Più basso è il primo numero, minore è il livello di sovrasaturazione permesso. Di conseguenza, la prima sosta diventa necessaria quando ci si trova a una profondità maggiore. Un fattore di gradiente dello 0% rappresenta la linea della pressione ambiente, mentre un fattore di gradiente del 100% rappresenta la linea del valore M.
Nell’illustrazione seguente il GF basso è impostato sul 30% e i compartimenti tissutali principali reagiscono al limite del 30% del valore M. A questa profondità avviene la prima sosta di decompressione.

Mentre la risalita prosegue, il GF passa dal 30% al 70%. GF 70 indica la quantità di sovrasaturazione consentita quando si risale in superficie. Minore è il valore del GF basso, più lunga sarà la sosta a bassa profondità necessaria per la desaturazione prima di emergere. Nell’illustrazione seguente il GF alto è impostato sul 70% e i compartimenti tissutali principali reagiscono al limite del 70% del valore M.
A questo punto è possibile risalire in superficie e concludere l’immersione.

L’effetto della % del GF basso sul profilo dell’immersione è illustrato nell’immagine seguente, che mostra il modo in cui la % del GF basso determina la profondità alla quale la risalita inizia a rallentare e la profondità della prima sosta di decompressione. Nell’illustrazione si osserva come i diversi valori della % del GF basso modificano la profondità della prima sosta. Maggiore è il valore % del GF basso, minore sarà la profondità della prima sosta.

se il valore % del GF basso è insufficiente, alcuni tessuti potrebbero ancora essere in fase di saturazione quando avviene la prima sosta.
L’effetto della % del GF alto sul profilo dell’immersione è illustrato nell’immagine seguente, che mostra come la % del GF alto determina il tempo di decompressione trascorso nella fase poco profonda dell’immersione. Maggiore è il valore % del GF alto, più breve sarà la durata totale dell’immersione e minore sarà il tempo che il subacqueo trascorrerà in acque basse. Se la % del GF alto è impostata su un valore inferiore, il subacqueo trascorre un tempo maggiore in acque basse e la durata totale dell’immersione si allunga.

È possibile regolare i fattori di gradiente. L’impostazione predefinita del livello di cautela nel computer per immersioni Suunto Ocean corrisponde a un valore medio (40/85). Può essere regolata in modo che il livello di cautela sia maggiore o minore rispetto al valore predefinito. Seleziona uno dei livelli predefiniti oppure imposta il tuo livello personalizzato.
I valori predefiniti sono i seguenti:
Basso: 45/95
Medio: 40/85 (predefinito)
Alto: 35/75
Per le immersioni ricreative, un’impostazione conservativa (35/75) offre un “cuscinetto” di tolleranza maggiore per evitare obblighi decompressivi. Un livello di cautela basso (45/95) consente più tempo NDL ma il “cuscinetto” di tolleranza diminuisce, quindi si tratta di un’impostazione più aggressiva.

La predisposizione alla MDD dipende da svariati fattori di rischio, quali la salute personale e il comportamento, che possono variare da soggetto a soggetto, oltre che da un giorno all’altro.
I fattori di rischio personali che possono accrescere la probabilità che insorga la MDD includono quanto segue:
- esposizione a bassa temperatura; temperatura dell’acqua inferiore a 20 °C (68 °F)
- livello di forma fisica inferiore alla media
- età, soprattutto per i subacquei con più di 50 anni
- affaticamento (da eccesso di attività fisica, mancanza di sonno, viaggio estenuante)
- disidratazione (che influisce sulla circolazione e può rallentare la desaturazione)
- stress
- attrezzature troppo aderenti (che possono rallentare la desaturazione)
- obesità (indice di massa corporea considerato obesità)
- forame ovale pervio (PFO)
- attività fisica svolta prima o dopo l’immersione
- attività pesante durante un’immersione (che incrementa il flusso sanguigno e convoglia così più gas ai tessuti)
non modificare i valori di riferimento relativi ai fattori di gradiente finché non ne comprendi gli effetti. Alcune impostazioni dei fattori di gradiente comportano un elevato rischio di MDD e di altri infortuni.
Profilo deco
Il profilo di decompressione può essere selezionato in Opzioni di immersione > Algoritmo > Profilo deco.
Profilo di decompressione ##Continua
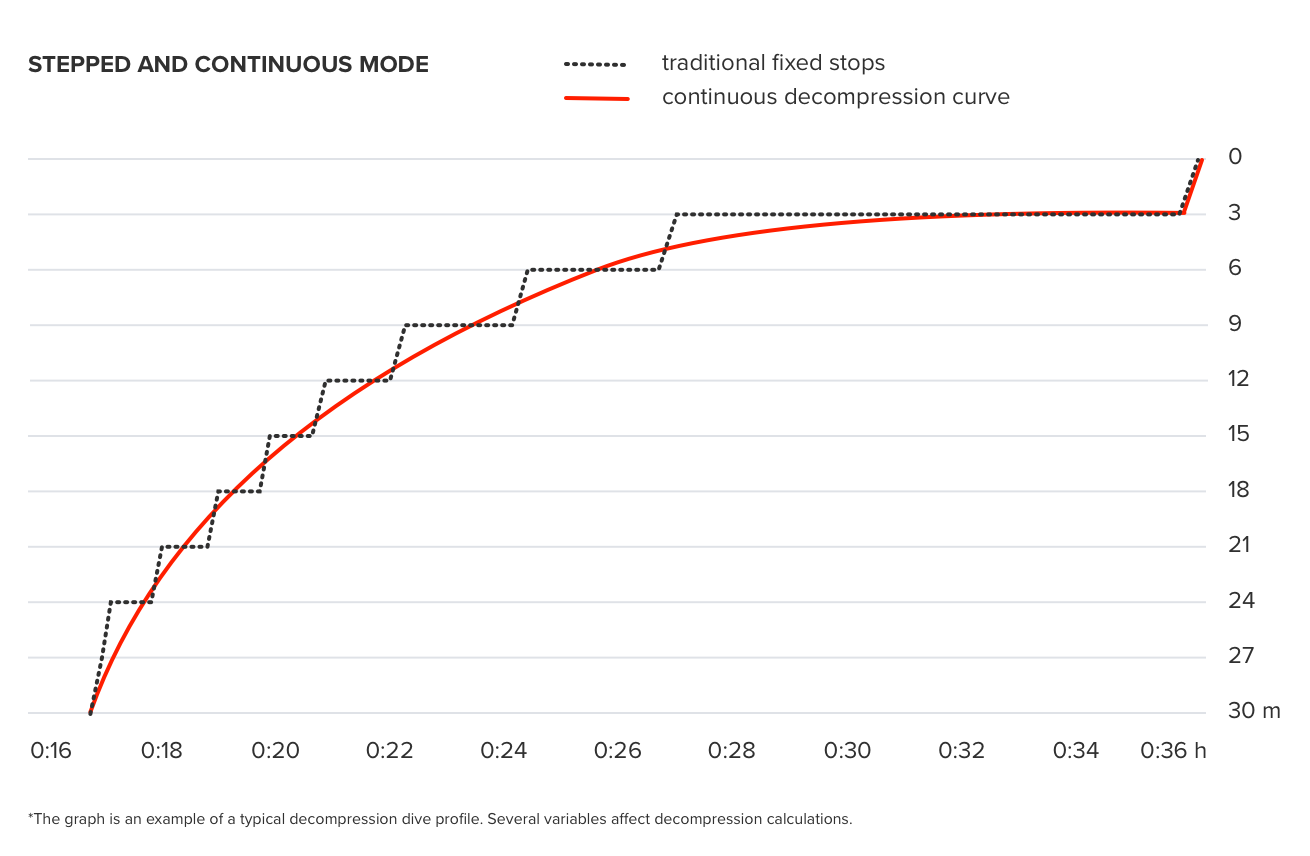
Tradizionalmente, fin dalle tabelle di Haldane nel 1908, le soste di decompressione sono state sviluppate sempre a quote fisse quali 15 m, 12 m, 9 m, 6 m e 3 m. Questo metodo pratico è stato introdotto prima dell’avvento dei computer per immersioni. Tuttavia, quando è in risalita, un subacqueo esegue effettivamente una decompressione distribuita su una serie di mini-tappe più graduali, creando di fatto una curva di decompressione continua e uniforme. L’avvento dei microprocessori ha consentito a Suunto di modellare più accuratamente il comportamento reale della decompressione. Durante qualsiasi risalita che prevede soste di decompressione, i computer per immersioni Suunto calcolano il punto in cui il compartimento di controllo supera la linea di pressione ambiente (ovvero il punto in cui la pressione del tessuto è maggiore della pressione ambiente) e inizia la desaturazione. Questo punto è il limite inferiore della decompressione ed è definito “floor”. La zona al di sopra della profondità di floor e al di sotto della profondità di ceiling è la finestra di decompressione. L’intervallo della finestra di decompressione dipende dal profilo di immersione.
La decompressione ottimale si verifica nella finestra di decompressione e viene indicata dalla compresenza di una freccia verso l’alto e di una freccia verso il basso accanto al valore della profondità. Se la profondità di ceiling viene superata, una freccia verso il basso e un allarme acustico invitano il subacqueo a ridiscendere nella finestra di decompressione.
La desaturazione nei tessuti veloci principali sarà lenta in corrispondenza o nelle vicinanze della profondità di floor perché il gradiente esterno è piccolo. I tessuti più lenti potrebbero essere ancora in fase di saturazione e, dato un tempo sufficiente, l’obbligo di decompressione potrebbe aumentare, nel qual caso il ceiling potrebbe spostarsi verso il basso e il floor spostarsi verso l’alto. Il floor di decompressione rappresenta il punto in cui l’algoritmo cerca di massimizzare la compressione delle bolle, mentre al ceiling di decompressione cerca di massimizzare la desaturazione.
Il vantaggio aggiuntivo di avere un ceiling e un floor di decompressione è che tiene conto del fatto che, in acque agitate, può essere difficile mantenere la profondità esatta per ottimizzare la decompressione. Mantenendo una profondità al di sotto del ceiling ma al di sopra del floor, il subacqueo continua ad effettuare la decompressione, anche se più lentamente della condizione ottimale, e beneficia di un “cuscinetto” di tolleranza aggiuntivo che riduce al minimo il rischio che le onde lo sollevino fino a superare il ceiling. Inoltre, la curva di decompressione continua utilizzata da Suunto offre un profilo di decompressione più regolare e naturale rispetto alla tradizionale decompressione “a tappe”.
Profilo di decompressione ##Con tappe
In questo profilo di decompressione, la risalita viene tradizionalmente suddivisa in “tappe”, o fasi, da 3 m (10 ft).
Si tratta di un modello in cui il subacqueo effettua la decompressione alle tradizionali profondità fisse. Il valore di ceiling nella finestra selezionabile indica la profondità della tappa successiva e, quando il subacqueo raggiunge la finestra di decompressione, un timer inizia a conteggiare la durata necessaria della sosta di decompressione.
Per un esempio di immersione con decompressione, vedi il paragrafo Esempio - Modalità multigas.
Impostazione di altitudine
L’impostazione di altitudine regola automaticamente il calcolo della decompressione in base all’escursione altimetrica data. Si trova in Opzioni di immersione » Algoritmo » Altitudine e consente di scegliere fra tre intervalli:
- 0 – 300 m (0 – 980 ft) (intervallo predefinito)
- 300 – 1500 m (980 – 4900 ft)
- 1500 – 3000 m (4900 – 9800 ft)
Di conseguenza, i limiti di non decompressione ammessi sono notevolmente ridotti.
La pressione atmosferica è più bassa in alta quota che al livello del mare. Viaggiare in alta quota provoca un aumento dell’azoto disciolto nel corpo, alterando lo stato di equilibrio registrato all’altitudine iniziale. Col tempo, l’azoto in eccesso viene gradualmente eliminato e l’equilibrio si ripristina. Suunto consiglia di acclimatarsi alla nuova altitudine aspettando almeno tre ore prima di immergersi.
Prima di immergersi in alta quota, occorre modificare le impostazioni di altitudine del computer in modo che possa eseguire i calcoli correttamente tenendo conto della quota elevata. Le pressioni parziali massime di azoto ammesse dal modello matematico del computer sono ridotte in funzione della pressione ambiente più bassa.
salire a un’altitudine superiore può provocare un temporaneo mutamento dell’equilibrio dell’azoto disciolto nel corpo. Suunto consiglia di acclimatarsi alla nuova altitudine prima di immergersi. Inoltre, per ridurre al minimo il rischio di MDD, è importante evitare di viaggiare a un’altitudine significativamente elevata subito dopo un’immersione.
SELEZIONA L’IMPOSTAZIONE DI ALTITUDINE CORRETTA! Se l’immersione avviene ad altitudini superiori ai 300 m (980 ft), l’impostazione di altitudine deve essere selezionata in modo corretto per consentire al computer di calcolare lo stato di decompressione. Il computer per immersioni non è adatto a essere utilizzato ad altitudini superiori a 3.000 m (9.800 ft). L’impostazione sbagliata degli adattamenti di altitudine o il superamento del limite massimo correlato comporterà dati di immersione e pianificazione inattendibili.
se fai immersioni ripetitive a un’altitudine diversa da quella precedente, cambia l’impostazione di altitudine affinché corrisponda alla quota della prossima immersione dopo il temine dell’immersione precedente. Questo garantirà calcoli dei tessuti più accurati.
Durata della sosta di sicurezza
Una sosta di sicurezza è sempre consigliabile per ogni immersione oltre i 10 m (33 ft) di profondità. È possibile regolare le impostazioni relative alla sosta di sicurezza come segue:
3 min: la sosta di sicurezza prevede sempre una sosta di 3 minuti, anche dopo l’ultima sosta di decompressione. La sosta di sicurezza non è inclusa nel TTS (tempo per risalire).
4 min: la sosta di sicurezza prevede sempre una sosta di 4 minuti, anche dopo l’ultima sosta di decompressione. La sosta di sicurezza non è inclusa nel TTS (tempo per risalire).
5 min: la sosta di sicurezza prevede sempre una sosta di 5 minuti, anche dopo l’ultima sosta di decompressione. La sosta di sicurezza non è inclusa nel TTS (tempo per risalire).
Sempre OFF: durante l’immersione non viene mostrata nessuna sosta di sicurezza.
Regolato: viene aggiunta una sosta di sicurezza di 3 minuti dopo la decompressione, ma la durata della pausa viene regolata in base al profilo di immersione. Questo significa che può essere più breve se il tempo viene trascorso in superficie. Il tempo previsto è incluso nel TTS (tempo per risalire).
Il superamento della velocità di risalita durante l’immersione non aumenta la durata della sosta di sicurezza.
Vedi il paragrafo Soste di sicurezza.
Profondità dell’ultima sosta
È possibile regolare la profondità dell’ultima sosta per le immersioni con decompressione in Opzioni di immersione » Algoritmo » Ultima sosta di decompressione. Ci sono due opzioni: 3 m e 6 m (9,8 ft e 19,6 ft).
L’impostazione predefinita della profondità dell’ultima sosta è 3 m (9,8 ft).
questa impostazione non ha alcun effetto sulla profondità di ceiling in un’immersione con decompressione. La profondità di ceiling dell’ultima sosta è sempre pari a 3 m (9,8 ft).
valuta l’idea di impostare la profondità dell’ultima sosta a 6 m (19,6 ft) se ti immergi in condizioni di mare mosso quando rimanere a 3 m (9,8 ft) risulterebbe problematico.